|
|
 |
クラインクネヒト オートモーティブ社は、MCS5/400
シリーズ製品に標準で、ラピッドプロトタイプ コードの実行環境を
統合化しています。
弊社がご提供する @Source-Lite ブロックセットを用いて、ユーザー様が既にご使用中の MATLAB/Simulink ® 上で、
ECU
マップやパラメーターを含むモデル作成を容易に行えます。 |
| |
|
|
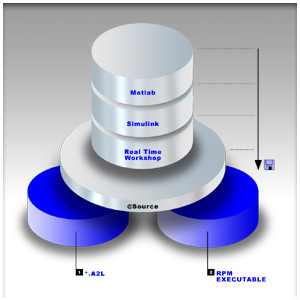
MATLAB/Simulink ® 上でビルドコマンドを実行することで、
ラピッドプロトタイピングモジュール (RPM) が生成されます。
この生成された RPM は、 ECU
イメージファイルと同様のもので 、容易に配布が行えます。
生成された RPM が MCS5/400
上に展開されると、 RPM は常に
起動時から動作します。
RPM に含まれるストラテジーは、 MCS5/400 により実行されます。
CCP/XCP や、 ルネサスアドバンスドユーザーデバッグプロトコル
等の高速インターフェースでターゲット ECU と接続の上、モデルの動作確認・キャリブレーション等が行えます。 |
| |
|
|
| |
| |
|
|
