クラインクネヒト オートモーティブ社の EPROM
エミュレーターは、それらのシナリオを根本的に解決する為のソリューションで
ありました。
1990 年代初め、ASAM 規格に関連する 3 つの内の 2 つの
標準化が採択される際、弊社の内部プロトコルと手法は、
その規格の標準化に寄与致しました。
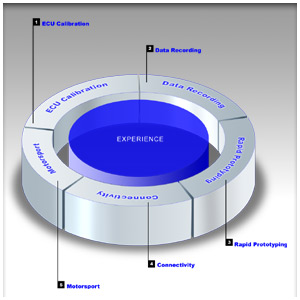
クラインクネヒト オートモーティブ社のシステムは、実車上での
評価や HMI 対応等、主要な全ての標準機能をサポートできる、
圧倒的な能力と接続性を有しております。 今日において、パワートレイン制御ストラテジーの開発は、
マップのキャリブレーションにとどまらず、ラピッドプロトタイプ
での先行開発が求められています。
これらのご要望にお応えするアプローチの一つとして、
クラインクネヒト オートモーティブ社のシステムではオプションを
追加して頂くことなく、MATLAB/Simulink
® 上で作成された
ラピッドプロトタイプモジュールを、既存制御ストラテジーとして
同時に複数実行できる機能を標準で搭載しております。
弊社は、高度なテクノロジーのコンパクト化を推し進める
アプローチの一つとして、モジュール構造を採用して
おりますので、カスタマイズのご要望にも応じられます。 |