|
|
 |
| As ECU strategies are most often
designed, developed and owned by the ECU manufacturer, Automotive
OEMs need a method of implementing control strategy independent
of the ECU supplier to enable problems found in calibration
and testing work to be overcome more rapidly. |
| |
| Automotive OEMs face pressure
to deliver development programs on time with ever increasing
control strategy complexity due to higher customer expectations
and tightening legislation. “Vehicle manufacturers and ECU
suppliers have widely identified controller strategy development
as a means of differentiating themselves from the competition.
In order to keep pace with the competition a streamlined development
process is necessary” (Rolfsmeier et al, 2003). “Manufacturers
and Suppliers are constantly searching for means to reduce
both time-to-market and development cost. As a kind of solution
to satisfy these requirements Rapid-control prototyping has
established itself as viable technology” (Shin et al, 2003). |
| |
Tools for the purpose are available,
however, the increasing requirements in this area have created
a need for this functionality to be available within or to
coexist seamlessly with calibration tools using the same physical
link to access the target ECU, and needing to operate concurrently.
Despite a requirement existing to date, the integration of
the stimulation of parameters with standard features found
in calibration tools has been limited to implementations that
have had no real time capability, that is loop times and latency
have been unacceptable with general operation being non deterministic.
This limitation is prohibitive to the requirement to use standards
based protocols to robustly run control strategy externally
from the ECU whilst retaining the functionality available
to a calibration engineer by the calibration tool. This has
now been changed with the introduction of the MCS400DR and
MCS400ADR.
Voorburg (2002) shows that there is focus on the anticipated
time savings that can be achieved in the programming, verification
and testing phases of the software development process. The
Software Development process that is outlined does not illustrate
the process of software delivery to the Automotive OEM by
the ECU supplier and outline the calibration process. It needs
to be recognised that due to the way that software is delivered
and subsequently calibrated many unanticipated interactions
will be encountered. By use of RCP in this area, the Automotive
OEM can communicate requirements for software changes to the
ECU vendor. The new requirements can potentially be validated
solutions. The impact of these can at the same time be tested
and engineers working on other systems impacted by these changes
can compensate accordingly.
|
| |
 |
| |
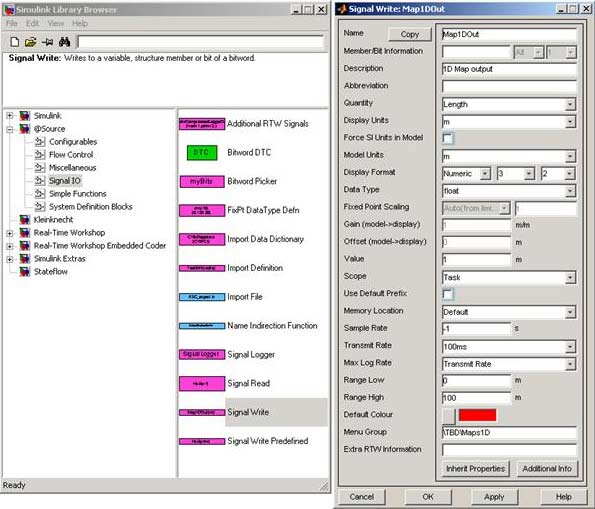
Kleinknecht Gredi calibration
software can also access parameters and variables available
in both the ECU and the RPM as well as other ECUs and data
acquisition equipment that is connected.
Use of the supplied blockset also enables data type handling
of allowing engineers to work in physical units easily; the
generated description file will also have the display model
and limits correctly defined. |
| |
 |
| |
| References |
| |
Lemon, K., Dmuchowski, T., Emaus,
B., (2000) Introduction to CAN Calibration Protocol, SAE Technical
Paper 2000-01-0389, Warrendale, Society of Automotive Engineers.
Rolfsmeier, A., Richert, J., Leinfellner, R., (2003) A New
Calibration System for ECU Development, SAE Technical Paper
2003-01-131, Warrendale, Society of Automotive Engineers.
Shin, M., Lee, W., Sunwoo, M., (2003) Implementation-Conscious
Rapid Control Prototyping Platform for Advanced Model-Based
Engine Control, SAE Technical Paper 2003-01-0355, Warrendale,
Society of Automotive Engineers.
Voorburg, F., (2002) Rapid Application Development for Embedded
Systems Using CAN Calibration Protocol, SAE Technical Paper
2002-01-1170, Warrendale, Society of Automotive Engineers. |
| |
|
|
|
|